Zoals anderen al eerder zeiden, zijn inductielussen de primaire en meest betrouwbare methode: de spoelen (meestal slechts enkele draadlussen) ingebed in de weg; gevoed met een gegeven frequentie van een generator, in aanwezigheid van metaal verandert de frequentie van het LC-circuit en het sensorcircuit detecteert de frequentieverandering en produceert een aanwezigheidssignaal. In sommige gevallen kunnen deze fietsen niet detecteren, maar ze zijn verreweg het meest voorkomend omdat ze niet worden beïnvloed door het weer (of beter gezegd, het detectiecircuit stemt af op langzame frequentieveranderingen veroorzaakt door het weer) en zijn immuun voor onbedoelde valse pluspunten. Merk op dat de lussen gelokaliseerd kunnen zijn (~ 2m grootte) of een lang deel van een laan kunnen beslaan.
Detectie wordt uitgevoerd door kaarten zoals deze: 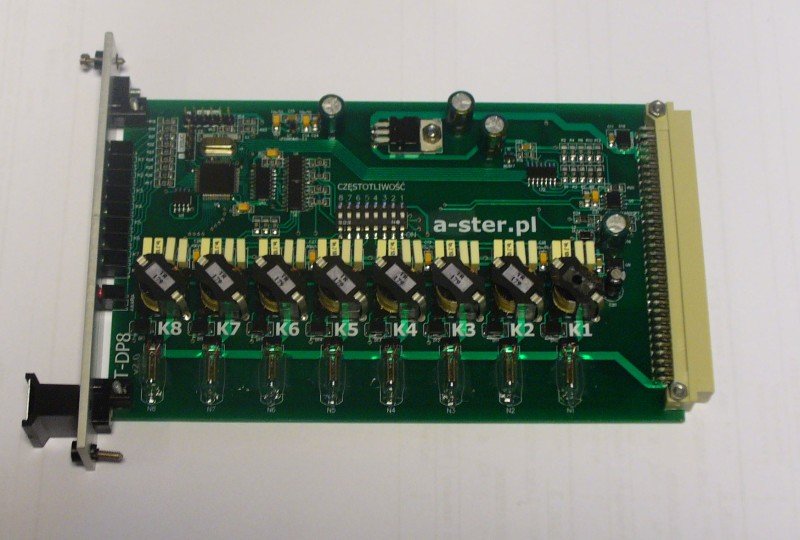
en door inductielussen gemaakt met draad gelegd in groeven zoals deze: 
of geplaatst in buizen onder het wegdek tijdens de bouwtijd (op de foto is een lus voor tramdetectie, maar voorgebouwde lussen zijn vergelijkbaar)

Videodetectie - camera's die zijn aangesloten op een speciale kaart met "detectiezones" gedefinieerd door gespecialiseerde software detecteren de voertuigen. Ze zijn kwetsbaar voor slecht weer en hebben de neiging om valse positieven te produceren door verblinding van autokoplampen, schaduwen van voertuigen op naburige rijstroken en dergelijke, maar in bepaalde gevallen - vooral waar het wegdek het installeren van detectielussen onmogelijk maakt (grind of slecht wegdek) hebben de voorkeur. Bovendien zijn de videodetectiekaarten aanzienlijk duurder dan kaarten voor detectielussen. 
Er zijn een paar minder gebruikte technieken, zoals geomagnetisch (het detecteren van veranderingen in het magnetische veld; deze zijn grotendeels afhankelijk van de grootte van het voertuig, dus een grote vrachtwagen kan een sensor in de aangrenzende rijstrook activeren, maar ze zijn duurzamer), radar (detecteer alleen bewegende voertuigen * - maar worden vaak gebruikt om voetgangers te detecteren omdat ze zelden immobiel blijven), laser (meten van afstand tot wegdek; voertuig in de weg verandert de gemeten afstand. Vrij betrouwbaar, maar alleen puntdetectie , geen gebiedsdetectie).
Hieronder is een geomagnetische sensor afgebeeld: 

en een radarsensoren (korte afstand voor voetgangers en fietsen, en lange afstand, voor cars): 

Ik heb gehoord van pneumatisch en piëzzo-elektrisch, maar ik heb deze nog nooit in gebruik gezien voor verkeerscontrole - waarschijnlijk problemen met slijtage en duurzaamheid; Ik weet dat deze worden gebruikt voor geautomatiseerde slagbomen voor parkeerterreinen, maar ze ondersteunen uiteraard een orde van grootte minder verkeer.
Voor stadsverkeer zijn de voertuigen uitgerust met een boordcomputer met een korte afstand radio (tot 500m) en gps, en ze zenden berichten uit over het invoeren van vooraf gedefinieerde "checkpoints" naar het verkeerssysteem, naast gegevens over de beoogde afslagrichting, vertraging tegen schema en enkele andere, waardoor de verkeersleider prioriteiten kan stellen. Een alternatief is een systeem dat de voertuigpositie doorgeeft aan een centrale eenheid, die vervolgens contact opneemt met controllers met berichten over het prioriteren van deze voertuigen.
Last but not least geven camera's / sensoren die stroboscooplichten met een specifieke frequentie detecteren, onmiddellijke prioriteit aan tegemoetkomende hulpverleningsvoertuigen. (en maak een foto van het voertuig in kwestie om misbruik te voorkomen.)
Controllers kunnen met elkaar communiceren en hun detectorstatus delen, zodat twee controllers elkaars detectoren kunnen gebruiken, bijvoorbeeld wanneer ze op korte afstand van elkaar.
Twee inductielussen op korte afstand (~ 1 m) van elkaar worden gebruikt om de snelheid en lengte van voertuigen te bepalen, waardoor aanpassing aan langere of langzamere voertuigen mogelijk is. Een andere toepassing van paren detectielussen dicht bij elkaar zijn richtingsdetectoren - uitgaande van de volgorde waarin de naburige lussen worden geactiveerd, kan men de richting bepalen waarin het voertuig beweegt. Dit wordt zelden gebruikt voor auto's, maar als een enkele spoorlijn met trams (straatauto's) die in beide richtingen rijden een weg kruist, kunnen dezelfde twee paar detectoren het groene licht voor het voertuig activeren en vervolgens registreren dat de straat is overgestoken, ongeacht van zijn richting, aangezien de paren 'naderende / vertrekkende' signalen kunnen genereren.
Een speciale 'virtuele' detector die bestaat uit twee lussen in één rijstrook op een aanzienlijke afstand meet de lengte van de rij auto's, waardoor voorspellingen kunnen worden gedaan tijd die nodig is om de rijstrook te verlaten (en ervoor te zorgen dat 'tijd aftellende displays' haalbaar zijn.)
Een ander speciaal type detector is een 'blokkerende' detector, ofwel in het midden van de kruising (camera) of erachter geplaatst , op de "vertrekkende" rijstrook (meestal een detectielus); het doel is om de binnenkomst te vertragen / blokkeren totdat de kruising vrij is, of om te voorkomen dat de kruising wordt geblokkeerd als er een verkeersopstopping ontstaat op de "exit" -strook en nieuwe voertuigen niet kunnen vertrekken.
Let op: dit is de "standaard" ingesteld, maar aangezien de controllers een gestandaardiseerd 24V / 'contact'-signaal kunnen accepteren, kan elke generieke bron worden gebruikt, bijvoorbeeld een infraroodafstandsbediening om die ene specifieke richting in te schakelen die wordt gebruikt in 0,1% gevallen, geactiveerd door de eigenaar van het huis met oprit recht naar de kruising, of door een handmatige trigger vanaf een fabriekspoort om een vrachtwagen in / uit te laten gaan, of wat dan ook.
Hieronder vindt u een generieke 16 ingangen / 16 uitgangen kaart. Deze worden meestal gebruikt voor voetgangersknoppen (en lampen), maar ze kunnen signalen van willekeurige bronnen afgeven en willekeurige eindpuntapparaten besturen. 
In sommige steden werken detectoren in "paren" van twee typen; Detectielussen zijn bijvoorbeeld zeer betrouwbaar voor het detecteren van voertuigen, maar mechanische belasting van zwaar transport kan ze beschadigen, en het repareren ervan is geen sinecure. De kaart kan een beschadigde lus detecteren (meestal open circuit -> geen frequentie of kortsluiting -> zeer hoge frequentie) en in dat geval begint de controller een back-upsensor te gebruiken, bijvoorbeeld radar of laser.
En slechts een screenshot van een van de controllers die de kaart toont met detectoren die hun status live weergeven (blauw = actief). Merk op dat de detector helemaal rechts - hij hoort niet bij deze controller; het zijn samengestelde gegevens van een naburige controller, zodat de korte weg die de twee verbindt niet overbelast raakt - zolang er auto's wachten in de potentiële congestiezone, zullen er vanuit de andere richtingen niet meer worden toegelaten. 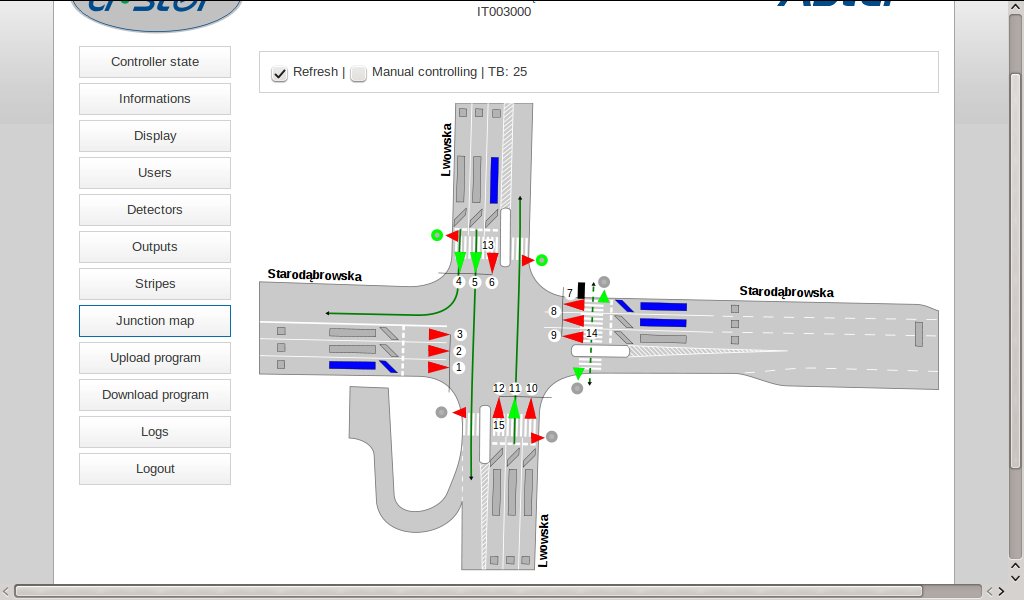
* Merk op dat hoewel radardetectors alleen auto's in beweging kunnen detecteren, dit niet betekent dat ze niet als een op zichzelf staande oplossing kunnen worden gebruikt ("alleen ondersteuning"). Soms worden de inductielussen ook op verkeerde locaties geplaatst (om verschillende redenen, incompetentie van de investeerder niet de minste), zodat auto's erachter / tussen hen stoppen en ze niet activeren tijdens rood licht. Dit is nog steeds geen groot probleem aangezien elke detector kan worden ingesteld als een detector met "geheugen". Elk voertuig dat zelfs maar een dergelijke detector tijdelijk activeert, zorgt ervoor dat het de actieve toestand behoudt tot het groene licht op de bijbehorende rijstrook brandt, en gedraagt zich vervolgens als normaal ("vergeetachtig") tijdens het groene licht. Merk ook op dat dit het standaardgedrag is voor drukknoppen voor voetgangers.
Natuurlijk is dit niet ideaal, aangezien een voertuig precies uit de detectiezone kan blijven steken tijdens de overgang van groen naar rood, of (zeg maar, door een fout van de bestuurder) de hele groene cyclus helemaal missen. Toch zijn dit relatief zeldzame gevallen, vooral omdat een ander naderend voertuig de detector meestal toch zal activeren.